在Cifar数据集上训练Res110模型¶
1、介绍¶
本教程将介绍使用Pet训练以及测试Res110在Cifar10数据集上训练分类模型的主要步骤,在此我们仅讲解模型训练的整体流程,部分实现细节请查阅系统的相应部分。
在阅读本教程的之前我们强烈建议您阅读原始论文 Deep Residual Learning for Image Recognition[1]以了解更多关于ResNet110模型的算法原理。
2、快速开始¶
2.1、数据准备¶
关于数据放置与数据制备的详细说明参见 此处
数据放置
Pet默认支持Cifar数据集,当您想要使用Cifar数据集进行您的模型训练和测试时,需要您将下载好的Cifar数据集放在$Pet/data/cifar文件夹下.
数据格式
对于不同的视觉任务,Pet支持在多种数据集上进行模型的训练和测试,并且规定了Pet标准的数据集源文件的文件结构与标注的格式。Cifar是Pet默认支持的数据类型,文件夹结构如下
cifar
|--cifar-10-batches-py
|--data_batch_1
|--data_batch_2
|--data_batch_3
|--data_batch_4
|--data_batch_5
|--test_batch
...
2.2、训练与测试¶
如果您已经有语义分割任务的训练经验,您可以直接在Pet中运行$Pet/tools/vision/train_net.py脚本开始训练您的模型训练过程。
训练
直接在Pet中运行以下代码开始训练您的模型
# 指定GPU参数进行训练
cd $Pet
python tools/vision/train_net.py --cfg cfgs/tutorials/resnet110_Cifar10.yaml --gpu_id 0,1,2,3
# --gpu_id参数为指定训练所用gpu,不指定默认训练所用gpu为8卡
测试
训练好的模型自动存储在指定位置($Pet/ckpts/tutorials/Cifar/resnet110),对应的模型有对应的model_latest.pth文件,在Pet中运行以下代码开始测试您的模型
# 指定GPU参数进行训练
cd $Pet
python tools/vision/test_net.py --cfg cfgs/tutorials/resnet110_Cifar10.yaml --gpu_id 0,1,2,3
# --gpu_id参数为指定测试所用gpu,不指定默认测试所用gpu为8卡
3、实验配置文件¶
Pet以yaml文件格式定义并存储本次实验配置信息,并根据任务类型和所用数据集等信息将其保存在cfgs目录下相应位置。关于配置系统(cfgs)的详细说明参见 此处。故在进行任何与模型训练和测试有关的操作之前,需要指定一个yaml文件,明确在训练时对数据集、模型结构、优化策略以及训练时可以调节的重要参数的设置,本教程以$Pet/cfgs/tutorials/resnet110_Cifar10.yaml模型为例讲解训练过程中所需要的关键配置,这套配置将指导ResNet110分类模型训练以及测试的全部步骤与细节,全部参数设置详见 此处
此yaml包含的大致配置信息如下(所有默认基础配置可在pet/lib/config/目录下查询)
MISC:# 基础配置 例如GPU数量
...
MODEL:# 模型配置 例如所采用的模型、网络结构
...
SOLVER:# 优化器及调度器配置 例如学习率、迭代次数、调度器类型等
...
DATA:# 数据相关配置 例如数据加载路径、标注格式等
...
TRAIN:# 训练配置 例如指定权重文件路径、指定训练集等
...
TEST:# 测试配置 例如指定测试集,指定图像大小调整的参数等
...
4、数据集准备与介绍¶
Pet默认支持Cifar10数据集,其余Pet支持的数据集详见 此处。先将python版本的CIFAR数据下载到本地并完成解压,确保Cifar10数据集已经存放在您的硬盘中并整理好文件结构。
CIFAR数据内容和类别如下:
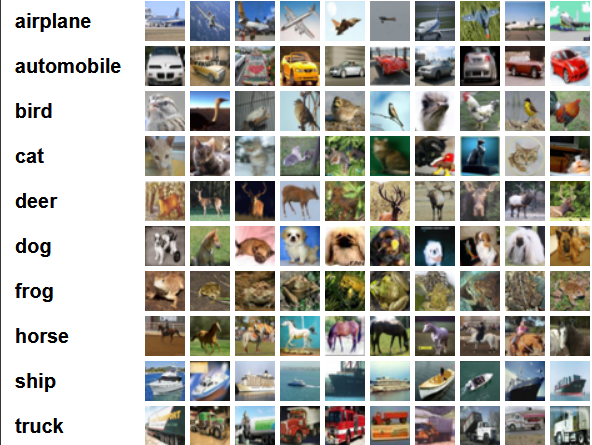 image
image
wget https://www.cs.toronto.edu/~kriz/cifar-10-python.tar.gz
tar -xvf cifar-10-python.tar.gz
CIFAR-10 是由 Hinton 的学生 Alex Krizhevsky 和 Ilya Sutskever 整理的一个用于识别普适物体的小型数据集。一共包含 10 个类别的 RGB 彩色图 片:飞机( airlane )、汽车( automobile )、鸟类( bird )、猫( cat )、鹿( deer )、狗( dog )、蛙类( frog )、马( horse )、船( ship )和卡车( truck )。图片的尺寸为 32×32 ,数据集中一共有 50000 张训练图片和 10000 张测试图片。
yaml文件中关于数据集部分的配置如下
DATA:
DATASET_TYPE: "cifar_dataset" # 指定数据集类型
PIXEL_MEAN: (0.4914, 0.4822, 0.4465)# 像素平均值(BGR顺序)作为元组
PIXEL_STD: (0.2023, 0.1994, 0.2010)# 像素标准差(BGR顺序)作为元组
关于数据加载的详细教程与解释详见 此处
5、模型构建¶
以$Pet/cfgs/tutorials/resnet110_Cifar10.yaml为例,其包含了基础配置、模型配置,模型配置主要包括骨干网络配置与结构设置,以及对应任务的Head模块定义等基本配置信息,我们可以通过这些基础信息构建适应任务的模型。全部模型部分构建的yaml文件如下:
MODEL:
BACKBONE: "cifar_resnet" #骨干网络配置
NECK: ""
GLOBAL_HEAD:
CLS: #指定 head 部分为分类
ONEHOT_ON: True
CIFAR:
RESNET:
DEPTH: 110
DROP_RATE: 0.1 #设置 dropout
ONEHOT:
NUM_CLASSES: 10 #指定 分类的类别
关于使用模型的详细参数配置解释参见$Pet/lib/config/model/backbone.py,关于模型构建的详细介绍参见 此处。接下来将从主干网络和分类任务两个模块来详细分析此yaml文件中关于模型构建的参数定义。
5.1、创建主干网络¶
ResNet110主干网络模型构建的配置信息如下,指定数据集类型和使用的主干网络,设置dropout的参数。
MODEL:
BACKBONE: "cifar_resnet" #指定数据集类型
CIFAR:
RESNET:
DEPTH: 110 #指定主干网络为ResNet110
DROP_RATE: 0.1 #设置 dropout
5.2、创建分类任务网络¶
在yaml文件中设定任务关键字为CLS,表明任务为分类,ONEHOT_ON: True表明分类任务使用One_Hot方法,yaml文件中对这部分进行了以下定义:
...
GLOBAL_HEAD:
CLS: #指定 head 部分为分类
ONEHOT_ON: True
...
根据yaml配置文件,通过GeneralizedCNN类实例化对应模型,并且在前向函数中控制数据流。具体代码在$Pet/pet/vision/modeling/model_builder.py中:
from pet.vision.modeling.model_builder import GeneralizedCNN
class GeneralizedCNN(nn.Module):
""" 视觉模型构建+前向函数定义 """
def __init__(self, cfg: CfgNode) -> None:
super(GeneralizedCNN, self).__init__()
self.cfg = cfg
# 构建backbone部分:ResNet
Backbone = registry.BACKBONES[cfg.MODEL.BACKBONE]
self.backbone = Backbone(cfg)
...
# Neck为"",无需构建此部分
if cfg.MODEL.NECK:
Neck = registry.NECKS[cfg.MODEL.NECK]
...
...
# 构建semseg的检测头
if cfg.MODEL.GLOBAL_HEAD.SEMSEG_ON:# cfg.infer_cfg()调用
self.global_semseg = GlobalSemSeg(cfg, dim_in, spatial_in)
...
...
6、模型训练¶
6.1、加载训练数据¶
在训练开始前需要您将下载好的Cifar数据集放在$Pet/data/cifar文件夹下,文件夹结构如下
cifar
|--cifar-10-batches-py
|--data_batch_1
|--data_batch_2
|--data_batch_3
|--data_batch_4
|--data_batch_5
|--test_batch
...
以$Pet/cfgs/tutorials/resnet110_Cifar10.yaml为例,在模型训练中的参数构建中指定了所用训练集等训练数据。关于数据加载的详细教程与解释详见 此处
TRAIN: # 训练参数设定
...
DATASETS: ("cifar10",) #指定训练集
6.2、优化器与调度器的构建¶
迭代优化是训练深度学习模型的核心内容,迭代优化主要包括了优化器和调度器的参数设定。本教程以$Pet/cfgs/tutorials/resnet110_Cifar10.yaml为例,讲解优化器和调度器的配置。关于迭代优化部分的详细介绍参见 此处
yaml文件中规定了优化器对基本学习率进行了设定,在优化器中对优化器类型、基本学习率、超参数进行了指定;在调度器中设定了最大迭代次数、SGD迭代次数、调度器类型。关于优化器与调度器的配置信息如下:
SOLVER:
OPTIMIZER:
TYPE: "SGD" # 指定优化器类型为SGD
BASE_LR: 0.1 #设置初始学习率
WEIGHT_DECAY_NORM: 0.0001
MOMENTUM: 0.9
SCHEDULER:
TOTAL_EPOCHS: 164 #设置总迭代轮数
POLICY: "STEP" #指定梯度下降策略
STEPS: (81, 122)
GAMMA: 0.1
WARM_UP_EPOCHS: 0
关于优化器与调度器的构建详细配置解释参见$Pet/lib/config/solver.py.
在Pet的代码实现中,优化器和学习率调度器具体对应Optimizer和Scheduler两个基本Python操作类,两个Python类会在整个训练的过程中一直被用于指导模型的优化。通过解析配置文件相关参数,传给Optimizer类(/pet/lib/utils/analyser.py)和LearningRateScheduler类(/pet/lib/utils/lr_scheduler.py),从而构建优化器及调度器,仅在训练阶段使用,以下列出了$pet/tools/vision/train_net.py部分关于优化器与调度器的构建源码:
from pet.lib.utils.optimizer import Optimizer
from pet.lib.utils.lr_scheduler import LearningRateScheduler
# 构建优化器
optimizer = Optimizer(model, cfg.SOLVER.OPTIMIZER).build()
optimizer = checkpointer.load_optimizer(optimizer)
...
# 构建调度器
scheduler = LearningRateScheduler(optimizer, cfg.SOLVER, iter_per_epoch=iter_per_epoch)
scheduler = checkpointer.load_scheduler(scheduler)
6.3、模型加载与保存¶
模型的加载与保存对网络训练十分重要,Pet定义了一个类CheckPointer用于相关功能的封装。以$Pet/cfgs/tutorials/resnet110_Cifar10.yaml为例,模型的加载主要需要确定模型参数的加载方式,加载预训练模型,加载模型参数;模型的保存主要包括模型参数保存、优化器与学习率调节器设置等。关于此部分的详细说明参见 此处
关于模型加载与保存的完整代码请参考pet/lib/utils/checkpointer.py
在此yaml文件的设置中通过初始化权重文件所在路径来实现模型的加载,$Pet/cfgs/tutorials/resnet110_Cifar10.yaml中预训练模型字段缺省代表Pet将无预训练模型进行模型训练。
模型的保存主要通过设定参数SNAPSHOT_ITER与SNAPSHOT_EPOCHS来确定,SNAPSHOT_ITER指定了每训练迭代多少次保存一次参数,SNAPSHOT_EPOCHS指定了每训练多少个epochs保留一次参数,二者只能有一个生效。这使得Pet能在断点后继续进行训练,关于这部分的参数详见$Pet/lib/config/solver.py.
# Snapshot (model checkpoint) period
SOLVER.SNAPSHOT_ITER = 10000
# Snapshot (model checkpoint) period
SOLVER.SNAPSHOT_EPOCHS = 50
6.4、模型训练参数配置¶
以$Pet/cfgs/tutorials/resnet110_Cifar10.yaml为例,模型主要的训练流程有指定权重文件路径、指定训练集、指定训练过程中需要用到的数据预处理参数、指定图像增强参数、指定随机裁剪参数等,在该yaml文件中对这部分参数进行了指定。关于模型训练的详细说明参见 此处
关于训练部分的详细参数配置解释参见$Pet/lib/config/data.py
训练基本参数设定,包括batch size与分割数:
TRAIN:# 训练参数设定
...
BATCH_SIZE: 128 # 训练最小batch size
SIZE_DIVISIBILITY: 32 # 指定图片尺寸的最小整数倍率
...
预处理参数设定,包括图像增强,随机裁剪等参数设定:
...
TRANSFORMS: ("resize", "random_crop", "random_horizontal_flip", "to_tensor", "normalize") # 指定数据增强的方式
RESIZE: # resize的参数设置
SCALES_SAMPLING: "choice"
SCALES: (32,)
MAX_SIZE: -1
RANDOM_CROP: # crop 的参数设置
CROP_SCALES: ((32, 32),)
BORDER: 128
关于模型训练的主要步骤包括创建模型、创建检查点、加载预训练权重或随机初始化、创建优化器、创建训练集与加载器、构建调度器、模型分布式等。以下代码列出了部分训练步骤,详细参见$pet/tools/vision/train_net.py。
...
# Create model
model = GeneralizedCNN(cfg)
logging_rank(model)
...
# Create checkpointer
checkpointer = CheckPointer(cfg.MISC.CKPT, weights_path=cfg.TRAIN.WEIGHTS, auto_resume=cfg.TRAIN.AUTO_RESUME)
# Load pre-trained weights or random initialization
model = checkpointer.load_model(model, convert_conv1=cfg.MISC.CONV1_RGB2BGR)
model.to(torch.device(cfg.MISC.DEVICE))
...
# Create optimizer
optimizer = Optimizer(model, cfg.SOLVER.OPTIMIZER).build()
optimizer = checkpointer.load_optimizer(optimizer)
logging_rank("The mismatch keys: {}".format(mismatch_params_filter(sorted(checkpointer.mismatch_keys))))
...
# Create scheduler
scheduler = LearningRateScheduler(optimizer, cfg.SOLVER, iter_per_epoch=iter_per_epoch)
scheduler = checkpointer.load_scheduler(scheduler)
...
# Train
train(cfg, model, train_loader, optimizer, scheduler, checkpointer, all_hooks)
在训练正常运行时,会在控制台输出如下的日志信息。
[10-26 11:41:27] |-[resnet110.yaml]-[iter: 20/63960]-[lr: 0.100000]-[eta: 2:49:11]
|-[max_mem: 169M]-[iter_time: 0.1588]-[data_time: 0.0239]
|-[total loss: 2.2620]
[10-26 11:41:29] |-[resnet110.yaml]-[iter: 40/63960]-[lr: 0.100000]-[eta: 2:28:50]
|-[max_mem: 169M]-[iter_time: 0.1397]-[data_time: 0.0105]
|-[total loss: 2.0806]
[10-26 11:41:32] |-[resnet110.yaml]-[iter: 60/63960]-[lr: 0.100000]-[eta: 2:23:09]
|-[max_mem: 169M]-[iter_time: 0.1344]-[data_time: 0.0105]
|-[total loss: 2.0089]
[10-26 11:41:34] |-[resnet110.yaml]-[iter: 80/63960]-[lr: 0.100000]-[eta: 2:20:38]
|-[max_mem: 169M]-[iter_time: 0.1321]-[data_time: 0.0105]
|-[total loss: 1.9373]
[10-26 11:41:37] |-[resnet110.yaml]-[iter: 100/63960]-[lr: 0.100000]-[eta: 2:22:06]
|-[max_mem: 169M]-[iter_time: 0.1335]-[data_time: 0.0105]
|-[total loss: 1.9134]
[10-26 11:41:40] |-[resnet110.yaml]-[iter: 120/63960]-[lr: 0.100000]-[eta: 2:23:10]
|-[max_mem: 169M]-[iter_time: 0.1346]-[data_time: 0.0105]
|-[total loss: 1.8703]
[10-26 11:41:43] |-[resnet110.yaml]-[iter: 140/63960]-[lr: 0.100000]-[eta: 2:23:25]
|-[max_mem: 169M]-[iter_time: 0.1348]-[data_time: 0.0130]
|-[total loss: 1.8468]
[10-26 11:41:45] |-[resnet110.yaml]-[iter: 160/63960]-[lr: 0.100000]-[eta: 2:23:26]
|-[max_mem: 169M]-[iter_time: 0.1349]-[data_time: 0.0104]
|-[total loss: 1.8268]
[10-26 11:41:48] |-[resnet110.yaml]-[iter: 180/63960]-[lr: 0.100000]-[eta: 2:23:09]
|-[max_mem: 169M]-[iter_time: 0.1347]-[data_time: 0.0110]
|-[total loss: 1.7823]
[10-26 11:41:51] |-[resnet110.yaml]-[iter: 200/63960]-[lr: 0.100000]-[eta: 2:22:46]
|-[max_mem: 169M]-[iter_time: 0.1343]-[data_time: 0.0111]
|-[total loss: 1.7527]
······
[10-26 14:12:13] INFO: Saving checkpoint done. And copy "model_latest.pth" to "model_iter63960.pth".
[10-26 14:12:13] INFO: Overall training speed: 63961 iterations in 2:17:49 (0.129293 s / it)
[10-26 14:12:13] INFO: Total training time: 2:18:23 (0:00:34 on hooks)
训练结束后,会将最终模型保存到$Pet/ckpts/tutorials/Cifar/resnet110路径下。
7、模型测试¶
7.1、加载测试数据¶
在测试开始前需要您将下载好的Cifar10数据集放在$Pet/data/cifar文件夹下,文件夹结构如下
cifar
|--cifar-10-batches-py
|--data_batch_1
|--data_batch_2
|--data_batch_3
|--data_batch_4
|--data_batch_5
|--test_batch
...
以$Pet/cfgs/tutorials/resnet110_Cifar10.yaml为例,在模型测试中的参数构建中指定了所用测试集等训练数据。关于数据加载的详细教程与解释详见 此处
TEST: # 测试参数设定
DATASETS: ("cifar10",) # 指定测试集
7.2、模型测试¶
以$Pet/cfgs/tutorials/resnet110_Cifar10.yaml为例,模型测试过程中需要指定图像大小调整的参数等,这部分在yaml文件中有详细的配置,以下列出了此yaml文件中的关于测试参数设定细节。
关于测试部分的详细参数配置解释参见$Pet/lib/config/data.py
测试基本参数指定:
TEST:# 测试参数设定
...
SIZE_DIVISIBILITY: 8# 指定每一个整理批次的分割数
...
测试过程中预处理参数指定,此处包括图像大小调整参数:
...
RESIZE:
SCALE: 32 # 测试期间resize图像大小
MAX_SIZE: -1
CENTER_CROP:
CROP_SCALES: (32, 32) # 测试期间crop图像大小
关于模型测试的主要步骤包括创建模型、加载模型、创建测试数据集与加载器、构建测试引擎等。此处列出部分源码作为解读,详细参见$pet/tools/vision/test_net.py。
# Load model
test_weights = get_weights(cfg.MISC.CKPT, cfg.TEST.WEIGHTS)
load_weights(model, test_weights)
model.eval()
model.to(torch.device(cfg.MISC.DEVICE))
# Create testing dataset and loader
dataset = build_dataset(cfg, is_train=False)
test_loader = make_test_data_loader(cfg, dataset)
# Build hooks
all_hooks = build_test_hooks(args.cfg_file.split("/")[-1], log_period=10, num_warmup=0)
# Build test engine
test_engine = TestEngine(cfg, model, dataset)
# Test
test(cfg, test_engine, test_loader, dataset, all_hooks)
7.3、模型评估(可视化与指标)¶
以$Pet/cfgs/tutorials/resnet110_Cifar10.yaml为例,模型的评估需要存储测试记录,设定评估参数,这部分在yaml文件中有详细的配置。关于模型评估的详细教程参见 此处
关于评估部分的详细参数配置解释参见$Pet/lib/config/config.py
测试的结果:
[10-26 14:47:03] INFO: Loading from weights: ckpts/tutorials/Cifar/resnet110/model_latest.pth.
[10-26 14:47:03] INFO: Creating dataset: cifar10.
[10-26 14:47:04] INFO: [Testing][range:1-79 of 10000][10/79][0.049s = 0.021s + 0.029s + 0.000s][eta: 0:00:03]
[10-26 14:47:04] INFO: [Testing][range:1-79 of 10000][20/79][0.041s = 0.013s + 0.027s + 0.000s][eta: 0:00:02]
[10-26 14:47:04] INFO: [Testing][range:1-79 of 10000][30/79][0.037s = 0.011s + 0.026s + 0.000s][eta: 0:00:01]
[10-26 14:47:05] INFO: [Testing][range:1-79 of 10000][40/79][0.036s = 0.010s + 0.026s + 0.000s][eta: 0:00:01]
[10-26 14:47:05] INFO: [Testing][range:1-79 of 10000][50/79][0.036s = 0.009s + 0.027s + 0.000s][eta: 0:00:01]
[10-26 14:47:05] INFO: [Testing][range:1-79 of 10000][60/79][0.036s = 0.009s + 0.026s + 0.000s][eta: 0:00:00]
[10-26 14:47:06] INFO: [Testing][range:1-79 of 10000][70/79][0.035s = 0.009s + 0.026s + 0.000s][eta: 0:00:00]
[10-26 14:47:06] INFO: [Testing][range:1-79 of 10000][79/79][0.034s = 0.008s + 0.026s + 0.000s][eta: 0:00:00]
[10-26 14:47:06] INFO: Total inference time: 3.135s
[10-26 14:47:06] INFO: test_acc1: 94.28% | test_acc5: 99.88%
可视化结果
分类模型暂不提供可视化结果,提供打印结果。
例如,输入一张鸟的图片,会得到如下的打印信息。
bird 1.0
dog 0.0
automobile 0.0
truck 0.0
frog 0.0
参考文献¶
[1] He, Kaiming, et al. “Deep residual learning for image recognition.” Proceedings of the IEEE conference on computer vision and pattern recognition. 2016.
[2] Yurtkulu S C, Şahin Y H, Unal G. Semantic Segmentation with Extended DeepLabv3 Architecture[C]//2019 27th Signal Processing and Communications Applications Conference (SIU). IEEE, 2019: 1-4.
[3] Zhou, Bolei, et al. “Scene parsing through ade20k dataset.” Proceedings of the IEEE conference on computer vision and pattern recognition. 2017.